DLIers made Good Achievements in the 10th National Marine Navigation Design and Production Competition
Date: 2021-09-10 09:56:15 Clicks:
Recently, the 10th National Marine Aircraft Design and Production Competition (Bohai Rim Regional Competition), as well as the 1st Marine Renewable Energy Equipment Design Competition, was started at Dalian University of Technology and Dalian Maritime University, A total of 156 teams and 844 contestants from 23 universities and research institutes in various provinces and cities participated in the competition. The competition included defence, spot demonstration and other links, and was broadcast live online.
The Leicester Institute and the Institute of Marine Science and Technology of Dalian University of Technology participated in this competition actively. Under the guidance of Mr Zeng Cen, three teams won two first prizes and one-second prizes in two competitions, Class A (New Concept Creative Design Group) and Class B2 (Design and Production Group), which was published on the cover of Peninsula Morning News.

The two winning teams of the design and production were all composed of students from DLI. Through offline defence and spot demonstration, they fully showed the creative designs of their teams, which won the first and second prizes in the B2 designated category (winning the top two) respectively and won high praise from the judges.
The winning team of the New Concept Creative Design Group was organized by a mixture of Leicester International Institute and the Institute of Marine Science and Technology, Captain Jieren Xie (DMSTI) led the team members Haoyuan Lu (DMSTI), Haowen Wang (DMSTI), Zhaoyu Pan (DLI) and Zihan Zhu (DLI) to show the innovative design results of the group through the online defence, and won the first prize of Class A (New Concept Creative Design Group)
The participants made their underwater robots, tested them and showed their innovative technological works. The entries of the three teams have been unanimously affirmed by the judges on spot for their excellent performance.
With the equipment support of the institute and careful guidance of the teachers, the three winning teams have made excellent results through hard work and were successfully selected into the national competition. They will continue to compete in the National final from August 13 to 14,2021. Wish them great success!
Exhibition of works
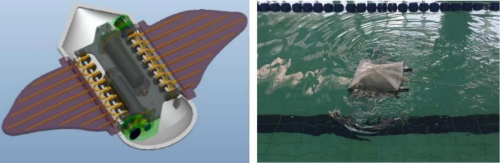
The project of "New Energy Bionic Ray Based on Cam Drive" mainly uses the characteristics of bionic rays, such as strong stability, low noise, stable operation and flexible movement, to track and monitor marine fish. Based on Raspberry Pi's low power consumption and strong performance, it can be combined with computer vision, artificial intelligence algorithms and other fields, so that it can track and observe all kinds of marine fish for a long time, and send the data to the upper computer regularly, which is of great significance for marine biologists to analyze the migration law and ethnic habits of fish. At the same time, because bionic rays can work stably in the ocean for a long time, they are used as monitoring equipment to monitor the marine climate.
" Towed ARV for offshore wind farms" is a new concept underwater vehicle based on ROV and AUV underwater vehicles in the traditional sense. Compared with AUV, it overcomes the shortcomings of communication difficulties and the inability of real-time transmission of video and sensor data. By using a power carrier, underwater information is transmitted to the surface towed body, and data is transmitted to the upper computer five kilometres away through the bridge, thus realizing the function of real-time transmission of information between an underwater carrier and towed body. Compared with ROV, towed ARV pulls the towing body to move through an underwater carrier, to realize long-distance navigation and overcome the constraint of cable on ROV movement. The towed ARV mainly puts forward new concepts and multi-dimensional innovations for the work and communication system of underwater vehicles. The towed ARV innovatively adopts the design of the surface towed body, which solves the communication problem of the underwater vehicle, and remotely controls the hull while communicating in real-time, thus realizing navigation in a complex environment and shallow water area and realizing real-time feedback of data and images. At the same time, according to the force and movement of the towing cable between the towing body and the underwater carrier, the relative position of the underwater carrier and the towing body is obtained, which achieves the same function of the ultra-short baseline positioning system and greatly saves the design cost.

The project of "Dual Underwater Vehicle for Monitoring Offshore Wind Power" has greatly enhanced the stability of the aircraft: compared with the single structure, the Dual Underwater Vehicle has a larger contact area, and when facing the disturbance of waves in the sea, the wave energy is dispersed, and the compressive strength of the structure is reduced. Although the machine will also be affected, it is easier to maintain stability and restore to its original state. The twin-body submersible is symmetrical in structure, and its weight is concentrated on the left and right sides, instead of the single-body structure, so it is easier to keep balance in underwater driving. Compared with the single structure, the twin-body submersible has better performance of bearing external force and keeping mechanical balance and stability in harsh environments.
